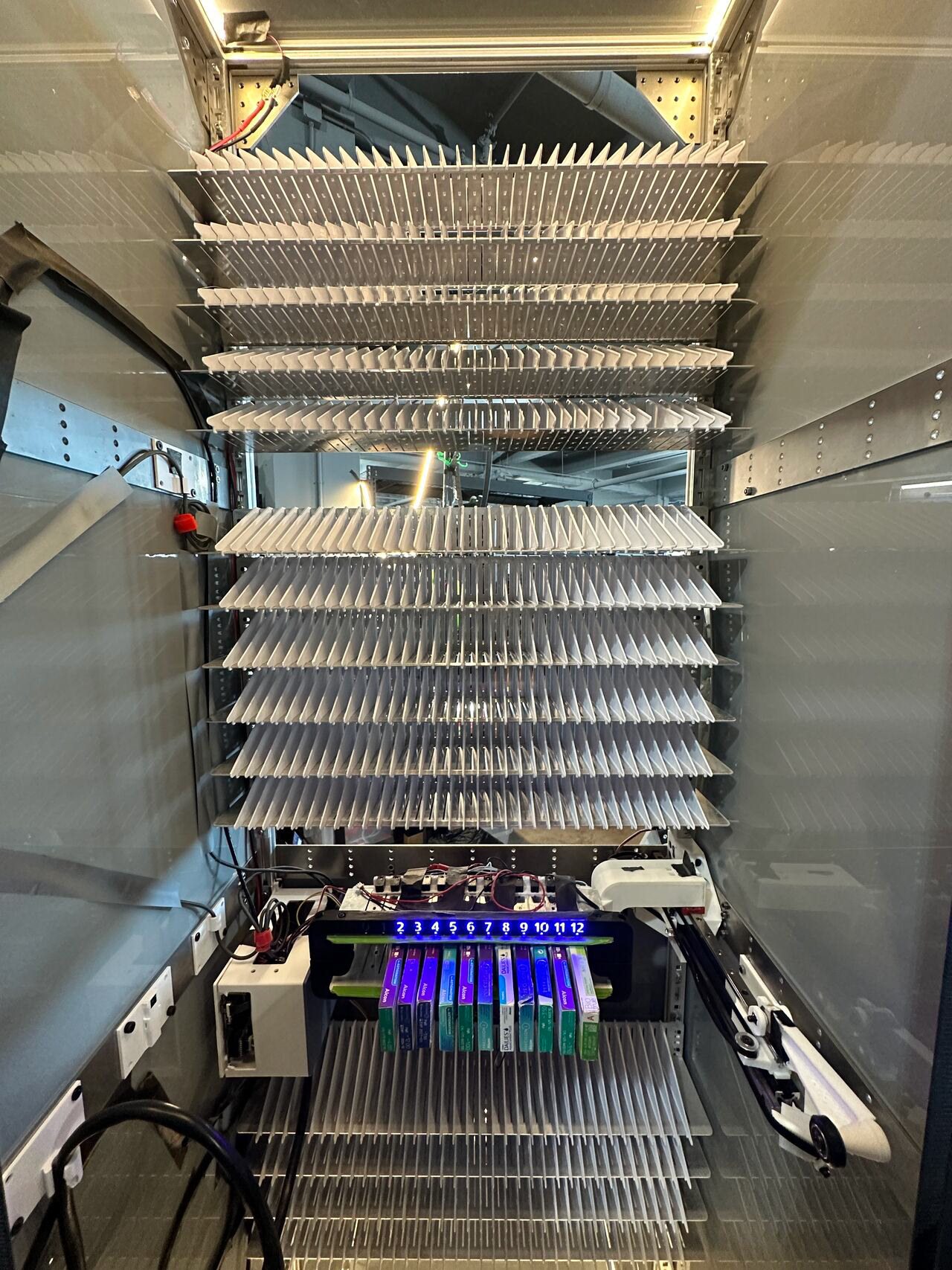
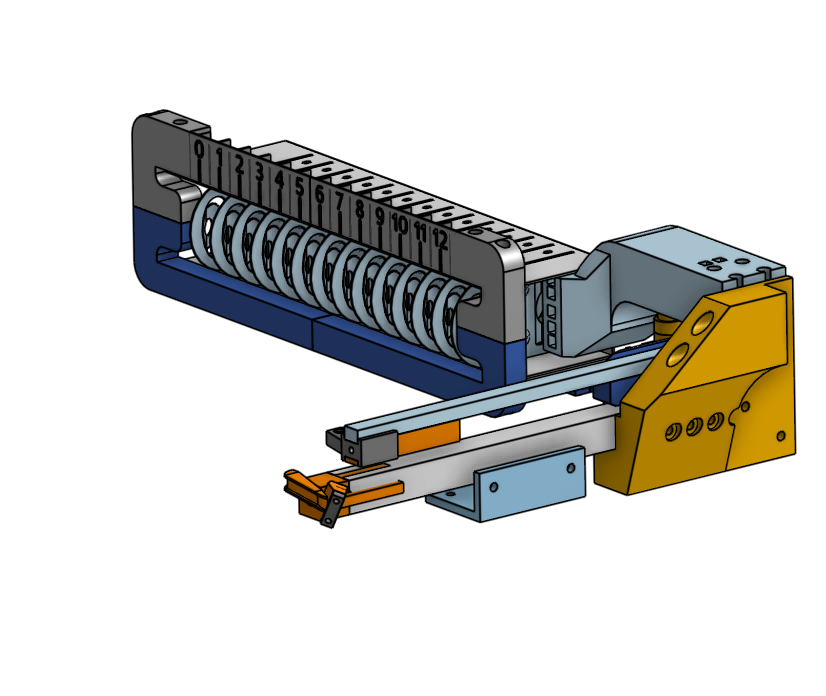
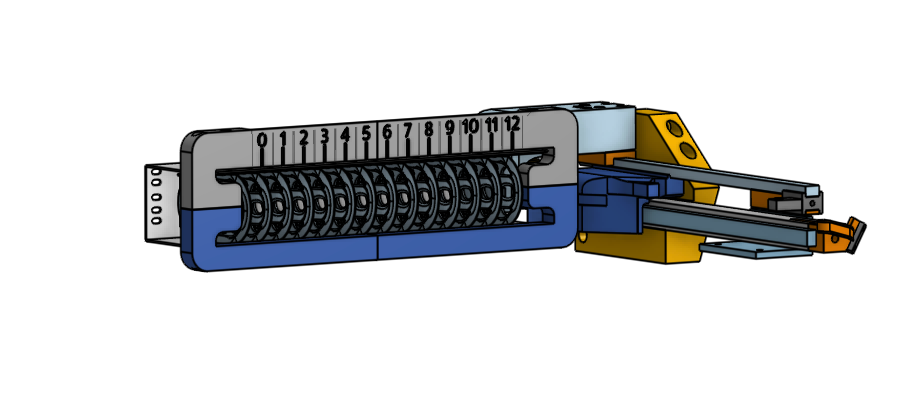
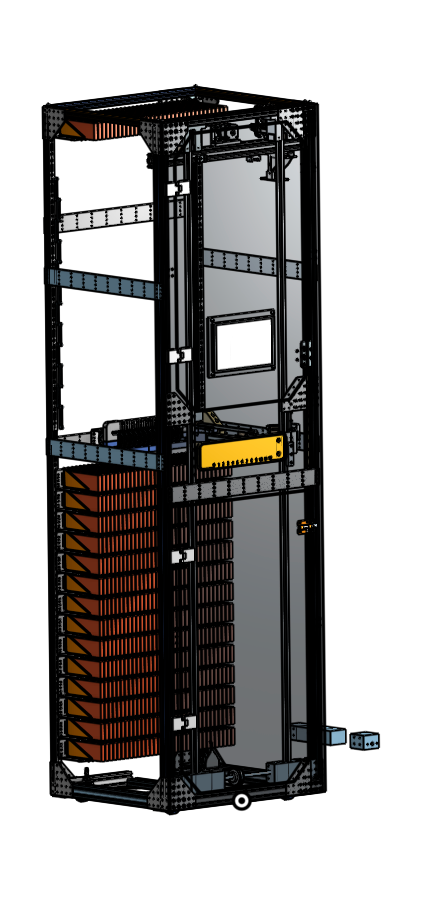
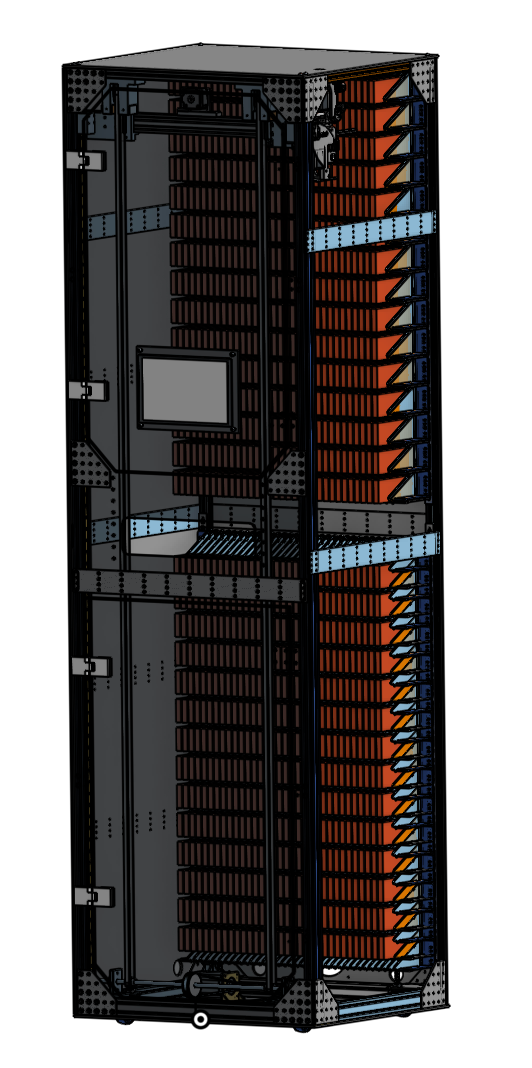
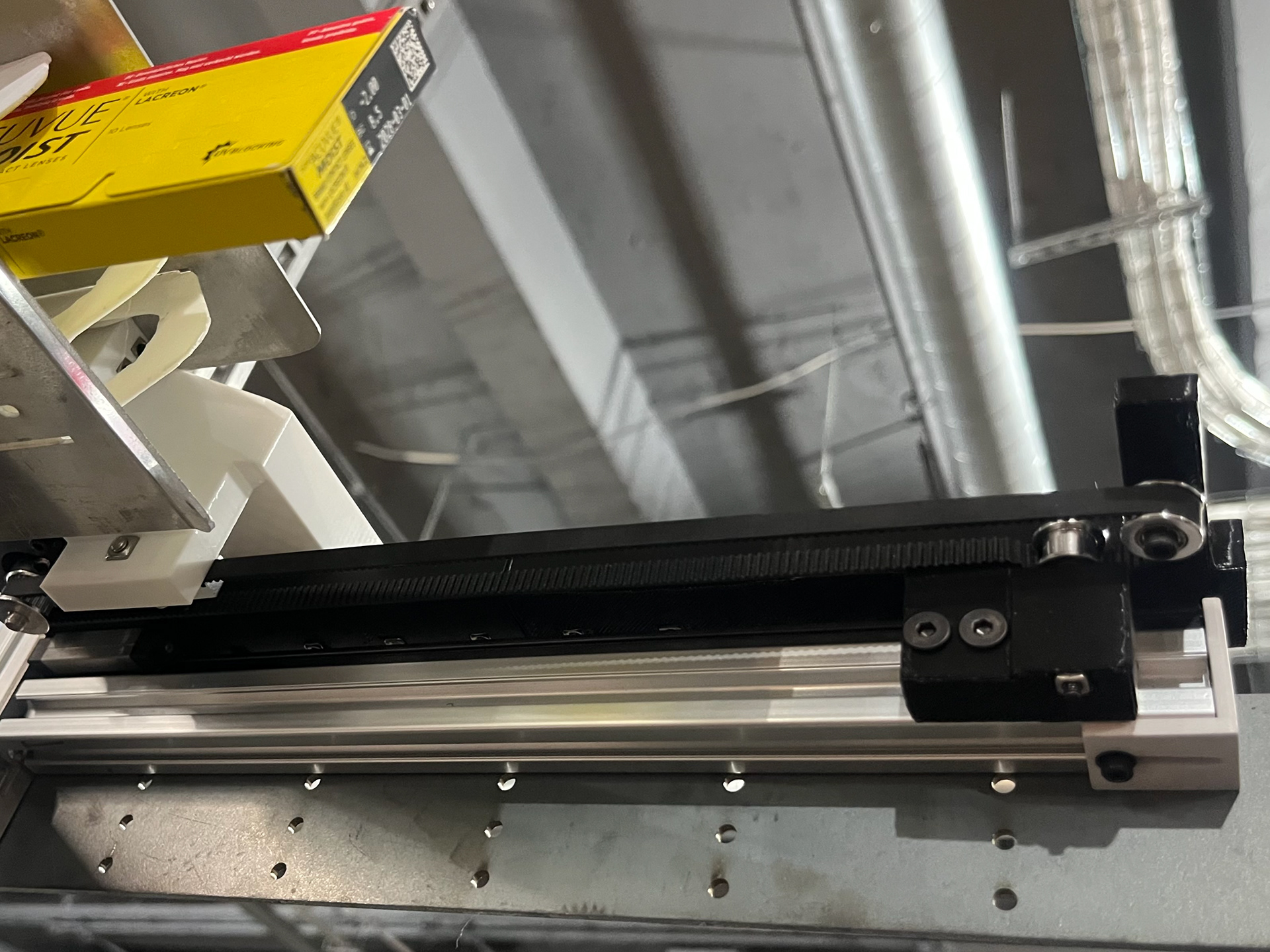
The OpenShelf K-Series robots are automated systems designed to manage and dispense contact lens boxes for optometrists, functioning like a smart vending machine. These robots scan, store, and retrieve boxes based on user input through an interface. One of the key subsystems I worked on was the input/output tray, responsible for receiving and dispensing contact boxes. The main design challenge was creating a compact yet fully extending telescoping mechanism that could span the robot’s full depth. To solve this, I engineered a two-stroke telescoping system driven by a single pulley and motor, cleverly utilizing the pulley path to eliminate the need for a second pulley, resulting in a more efficient and space-saving design.