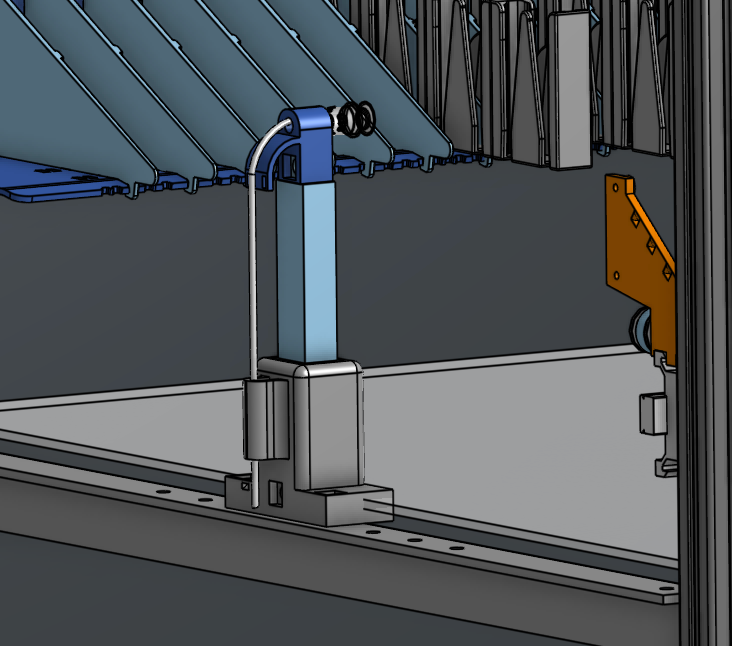
This electro-mechanical project involved developing a mechanism to lift contact blister packs out of a container using a vacuum pump and a linear actuator. The actuator, controlled by an H-bridge circuit, lifted the blister pack while the vacuum, managed by a Mosfet controller, held it in place. A particularly interesting aspect was integrating this mechanism with a larger robotic system, where a separate claw handled the bulk containers holding the contact packs, demonstrating coordinated interaction between subsystems.